Object Detection
Computer Vision (컴퓨터 비전)
- 인간의 시각과 관련된 부분을 컴퓨터 알고리즘을 이용해 구현하는 방법을 연구하는 분야
주요 컴퓨터 비전 분야
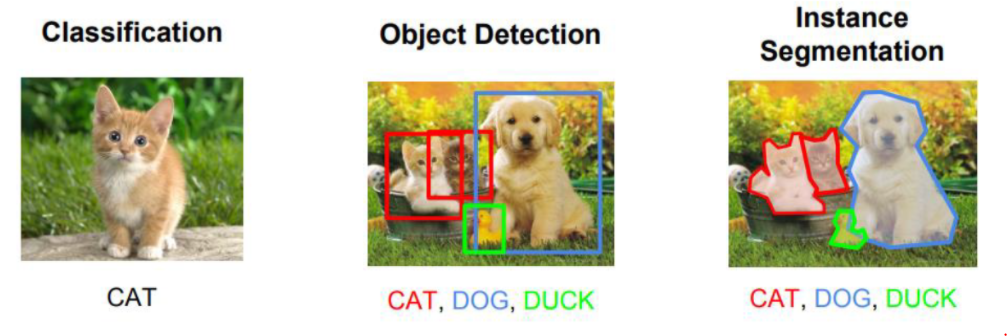
- Image Classification (이미지 분류)
- 이미지가 들어오면 어떤 물체인지 분석 → 주 물체로만 분류
- Object Detection (물체 검출)
- 좀 더 세분화 하게 찾아줌 → 그 물체의 위치를 찾아 박스를 쳐준 후 물체를 분류
- 물체의 좌표를 2개만 찾으면 됨
- Image Segmentation (이미지 세분화)
- Object Detection 처럼 물체를 찾기는 하지만 픽셀 단위로 찾는다.
- 픽셀 단위로 찾아야 하기 때문에 많은 좌표가 필요함
Object Detection 개요
Object Detection = Localization + Classification
- Object Detection은 영상에 존재하는 Object(물체)들을 Bounding Box를 이용해 위치를 찾아내고(Localization-Regression 사용) class를 분류(Classification)하는 작업이다
- 사진 속에서 찾는 정답이 1개인 Image Classification과는 달리 Object Detection은 정답의 개수가 정해져 있지 않기 때문에 찾기 힘들다
- 사진 속에 있는 물체의 최대값을 정해 높는다.
- Object Detection방식
- One stage detector: localization과 classification을 하나의 네트워크에서 처리
- localization과 classification을 한 번에 처리하는 방식
- 성능은 떨어지지만 속도가 빠르다 → 하지만 속도가 더 빠르기 때문에 이쪽을 주로 연구하게 되어 two stage detector보다 성능이 좋아지게 됨
- Two stage detector: localization과 classification을 나눠서 순차적으로 실행 처리
- 모델을 2개로 나눠서 각자의 역할을 수행하는 방식
- 성능은 좋지만 속도가 느리다
- One stage detector: localization과 classification을 하나의 네트워크에서 처리
Object Detection의 출력값
- Bounding Box(BBox)의 Location(위치)
- Bounding Box의 위치값은 4개로 구성되어 있는데 각 값이 가리키는 것은 모델마다 다르다. 대부분 아래 3가지 경우중 하나이다.
- x좌표, y좌표, width, height 로 구성
- x좌표, y좌표
- Bounding Box 중심점의 좌표 → 주로 이 방식을 사용한다.
- Bounding Box 좌상단 좌표
- width, height: Bounding Box 의 너비(width)와 높이(height)
- x좌표, y좌표
- x_min, y_min, x_max, y_max를 이용
- x_min, y_min: 좌상단(Left-Top)의 x, y 좌표
- x_max, y_max: 우하단(right-bottom)의 x, y 좌표
- 알고리즘에 따라 좌표와 크기를 실제값 또는 이미지의 width, height 대비 비율로 지정한다.
- 비율로 했을 때 장점은 원본 이미지의 크기가 resize되어도 영향을 받지 않는다.
- ex. (X좌표/이미지 width, Y좌표/이미지 height, bbox width/이미지 width, bbox height/이미지 height)
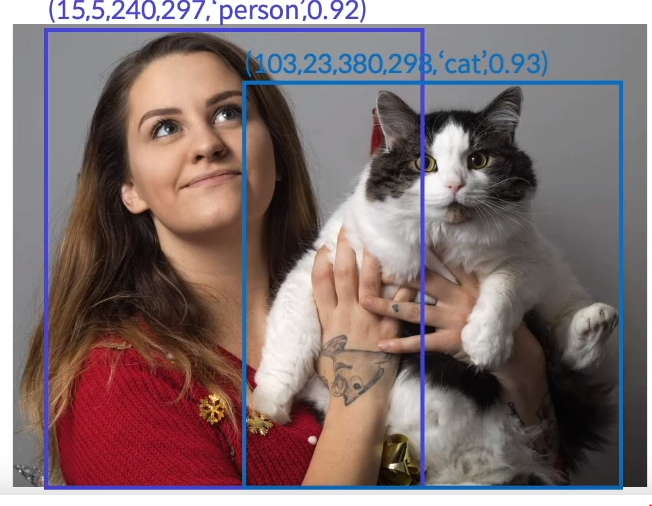
- Object class 관련 출력값
- Bounding Box안의 물체의 class 별 확률
- Confidence score
- Bounding Box 안에 찾으려는 Object(물체)가 있을 확률값으로 0.0 ~ 1.0 사이의 값
![Alt text]()
- Bounding Box 안에 찾으려는 Object(물체)가 있을 확률값으로 0.0 ~ 1.0 사이의 값
- Object Detection 은 하나의 이미지안에서 N개의 Object를 검출해 내야 한다. 그런데 몇개를 찾을지는 입력 이미지마다 다르다. 그래서 한 이미지에 찾으려는 Object가 있을 최대의 개수를 정하고 모델은 무조건 그 개수만큼 bounding box(위치+분류)를 추론(출력)하도록 한다. 추론한 결과에서 후처리를 통해 최종 추론결과를 낸다.
- 위와 같은 이유로 bounding box마다 box안에 물체가 있을 확률(confidence score)을 모델이 찾도록 하여 낮은 확률의 box는 후처리에서 제거한다.
Object Detection 성능 평가
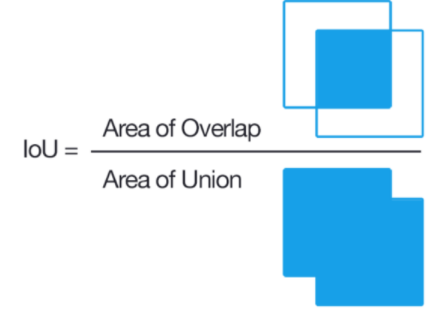
IoU (Intersection Over Uinon, Jaccard overlap)
- 두개의 bounding box가 얼마나 겹치는지를 나타내는 평가지표.
- 두개의 Bounding Box가 일치할 수록 1에 가까운 값이 나오고 일치하지 않을 수록 0에 가까운 값이 계산된다.
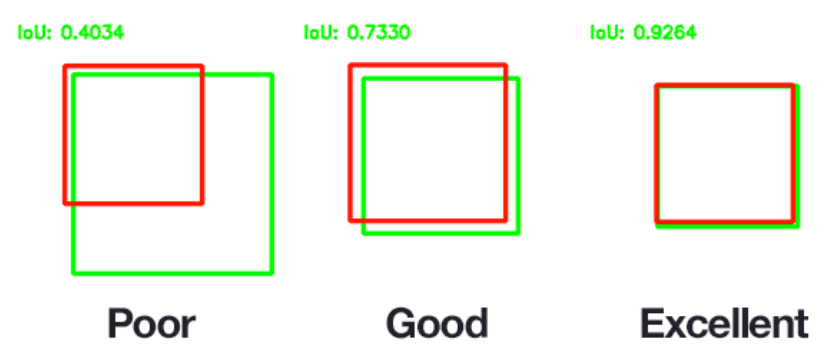
- 일반적으로 IoU값 0.5를 기준으로 그 이상이면 많이 겹치는 것으로 적게 겹치는 것으로 본다.
- 이 기준이 되는 값을 IoU Threshold(임계값) 라고 한다.
- 임계값은 정할 수 있다.
- 0.5 수치는 ground truth와 66.% 이상 겹쳐(overlap)되야 나오는 수치이며 사람의 눈으로 봤을때 잘 찾았다고 느껴지는 수준이다.
- 이 기준이 되는 값을 IoU Threshold(임계값) 라고 한다.
- 예시
- Train(학습) 시 모델이 예측한 bounding box와 ground truth(정답) bounding box가 얼마나 겹치는지 확인하는 지표로 사용.
- 모델이 추론한 결과에서 하나의 object에 대해 여러개 bounding box가 나오면 그중 하나만 선택할 때 사용.(NMS)
![Alt text]()
mAP (mean Average Precision)
- 여러개의 실제 Object가 검출된 재현율(Recall)의 변화에 따른 정밀도(Precision) 값을 평균화 한 것
- 클래스들의 AP의 평균값
- mAP를 이해하기 위해선 precision, recall, precision-recall curve, AP(Average Precision)을 이해 해야 한다.
precision-recall curve, AP(Average Precision)는 Object Detection(물체 검출) 알고리즘 성능 평가를 위해 사용되는 방법중 하나이다.
Precision(정밀도)와 Recall(재현율)
- 정밀도는 Positive로 예측한 것 중 실제 Positive인 것의 비율. (Positive로 예측한 것이 얼마나 맞았는지의 수치)
- Object Detection에서는 Detect(검출) 예측결과가 실제 Object(물체)들과 얼마나 일치하는지를 나타내는 지표
- TN에 대한 개념이 필요 없다 → positive인 값만 필요하기 때문 \(\cfrac{TP}{All\,Detection}\)
- 재현율은 실제 Positive인 것 중 Positive로 예측한 것의 비율. (Positive인 것을 얼마나 맞았는지의 수치)
- Object Detection에서는 실제 Object(물체)들을 얼마나 잘 Detect(검출) 했는지를 나타내는 지표 \(\cfrac{TP}{All\,Ground\,Truth}\)
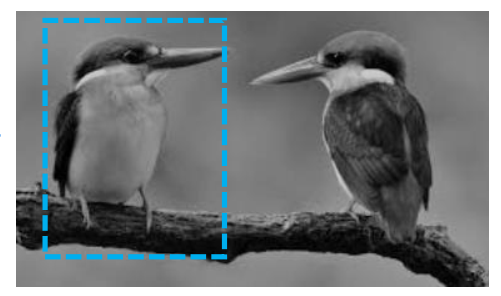
위의 그림을 보면 두마리 새 중 한마리만 Detect 했다.
- 1개를 예측해서 1개 맞았으므로 Precision은 100%(1.0)가 된다.
- 새는 두 마리인데 하나만 Detect(검출) 했으므로 Recall은 50%(0.5)가 된다.
Object Detection에서 TP, FP, FN

- FP(False Positive)
- 다른 class로 예측한경우.
- IoU가 threshold 이하인 경우.
- 아예 잘못된 위치로 예측한 경우
- Positive(예측은 했으나) False(잘못) 한 것
- FN(False Negative)
- 아예 찾지를 못한 경우
precision과 recall의 trade off(반비례관계)
Confidence threshold: 지정된 값 이상의 confidence를 가진 결과만 예측결과로 사용하고 그 이하인 것들은 무시한다.
이 값을 0.5로 설정하면 confidence score가 0.5 미만인 결과(0.1,0.2,0.3등)는 무시한다.이 값은 하이퍼파라미터이다.
- confidence threshold를 낮게 잡으면 precision은 낮게 recall은 높게 나온다.
- confidence threshold를 높게 잡으면 precision은 높게 recall은 낮게 나온다.
- Precision과 Recall은 이렇게 반비례 관계를 가지기 때문에 Precision과 Recall의 성능 변화 전체를 확인해야 한다 →precision-recall curve
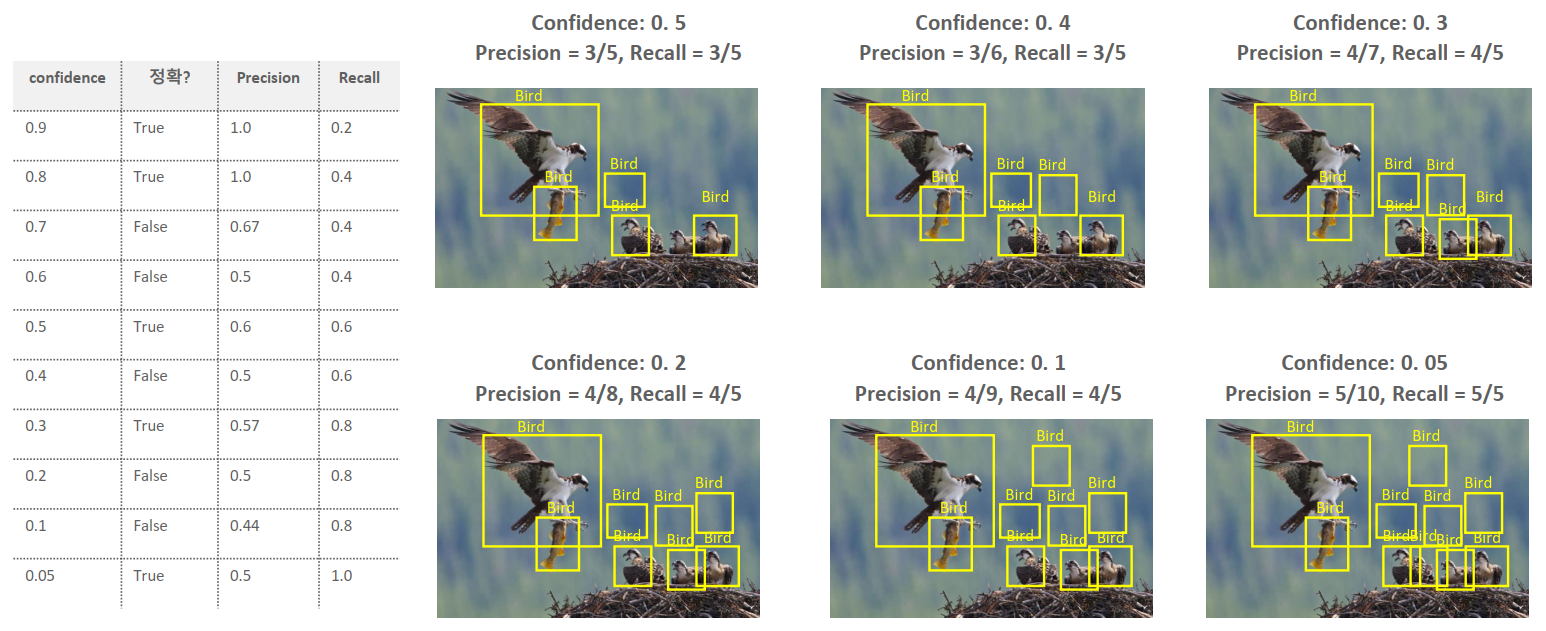
Precision-Recall curve
- confidence threshold의 변화에 따라 recall과 precision의 값이 변화게 된다.
이것을 recall이 변화할때 precision이 어떻게 변하는지를 선그래프로 나타낸 것을 Precision-Recall curve 라고 한다. - Object Detection 알고리즘의 성능을 성능을 평가하는 방법으로 많이 사용된다.
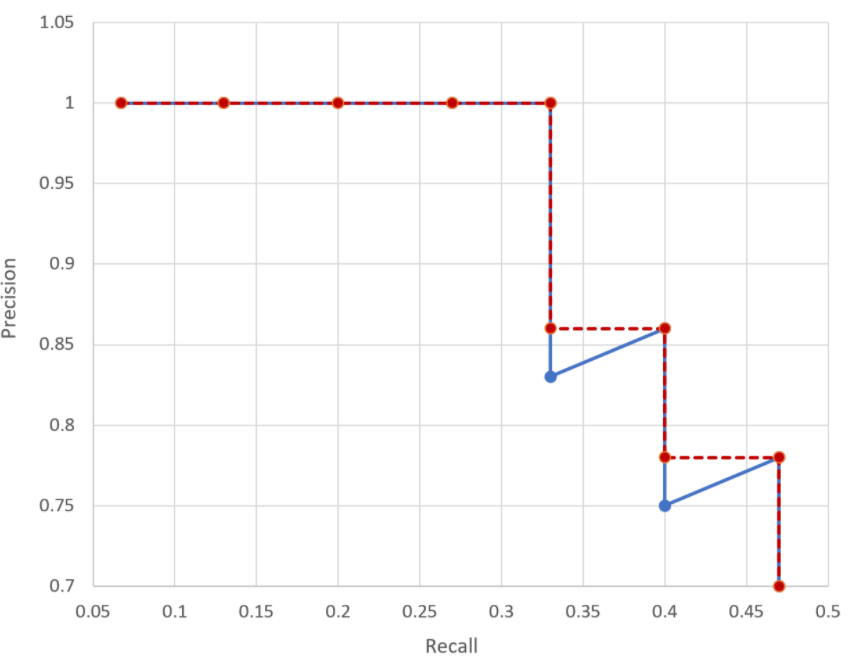
Average Precision (AP)
- precision-recall curve 그래프를 하나의 scalar 값으로 정량화한 값
- Average precision는 precision-recall curve 그래프의 선 아래 면적을 계산한 값이다.
- Average precision은 0 ~ 1사이의 값을 가지며 1에 가까울 수록 좋은 성능을 나타낸다.
- Average Precision을 계산은 Precision-recall curve의 선을 단조적으로 감소하는 그래프로 바꾼 뒤 면적을 계산한다.
Model 추론 결과 후처리 (Post Processing)
- 모델이 추론한 Bounding Box 예측 결과를 후처리를 통해 정제한다.
NMS
(Hard) NMS
1
2
- Non Max Suppression
- Detect(검출)된 bbox(Bounding Box)들 중에서 비슷한 위치에 있는 겹치는 bbox들을 제거하고 가장 적합한 bbox를 선택하는 방법

실행 로직
- Detect(검출)된 Bounding Box 중 Confidence score가 Confidence threshold (신뢰 임계값: Hyper Parameter) 이하의 박스들을 제거한다.
- 찾고자 하는 물체를 표시한 bbox만 제외하고 다 지운다
- 가장 높은 confidence score를 가진 bounding box 순서대로 내림차순 정렬을 한다
- 높은 confidence score를 가진 bounding box와 겹치는 다른 bounding box를 모두 조사하여 IoU가 특정 threshold(임계값) 이상인 bounding box들을 모두 제거한다. (ex. IoU threshold > 0.5)
- IoU(곂치는 부분)이 threshold 이하이면 그대로 유지 → 서로 다른 값이다.
- IoU가 threshold 이상이면 작은 값 지우기 → 같은 값을 나타내는 것으로 좀 더 confidence가 높은 것을 남긴다.
- confidence threshold는 보통 0.2에서 0.5로 잡아준다.
- 단점: 물체가 곂쳐 있을 경우 하나밖에 찾지 못해 mAP가 낮아진다. → Soft NMS
Soft NMS
- 겹치는 bbox의 경우 confidence score가 낮은 것을 제거하지 않고 confidence score를 줄여서 남기는 방식
- 논문
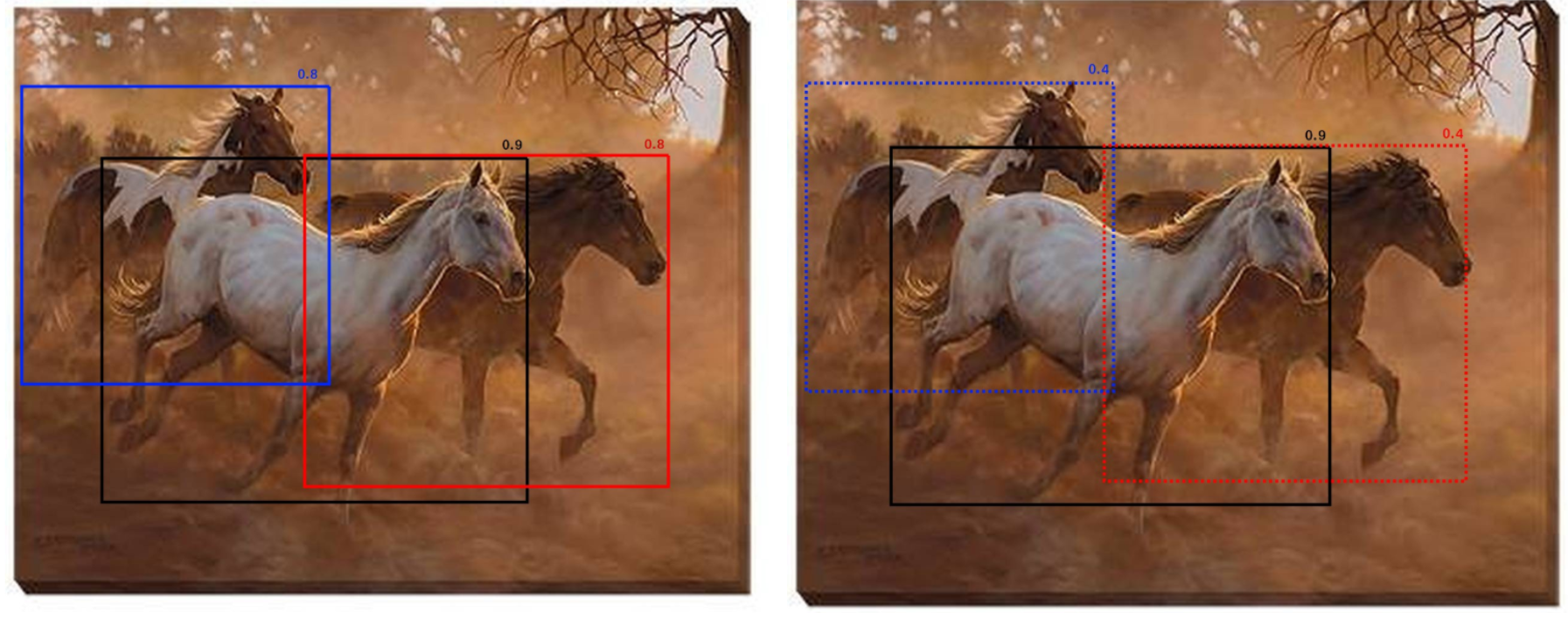
- 위의 그림의 경우 좌우 사이드에 있는 말의 confidence를 0.4로 줄인다. (hard는 제거)