딥러닝 모델 성능 개선 기법들
최적화
- train data에서 최고의 성능을 얻으려고 모델 파라미터들을 조정하는 과정 (옵티마이저가 한다.)
- 결국 모델을 학습하는 과정을 말한다.
모델의 성능 - 일반화, 과대적합, 과소적합
- 일반화(Generalization)
- 훈련된 모델이 처음 보는 데이터에서 대해 잘 추론할 수 있는 상태.
- 학습을 통해 일반화된 특징들을 잘 찾은 상태.
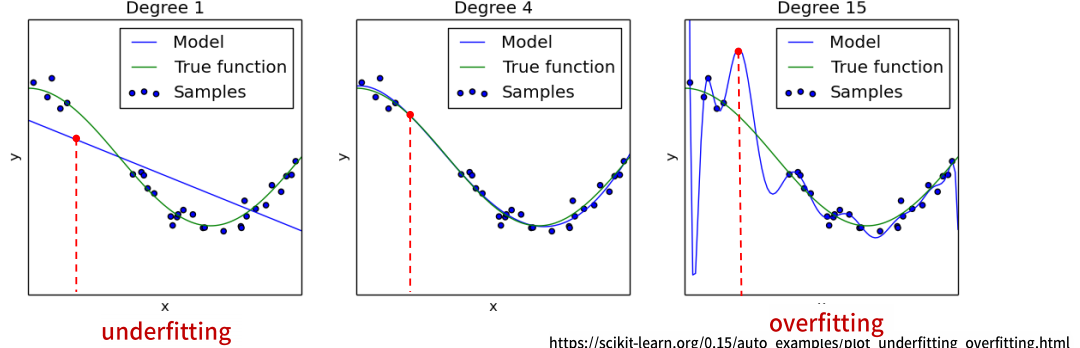
- 과대적합(Overfitting)
- 검증 결과 Train set에 대한 성능은 좋은데 Validation set에 대한 성능은 안좋은 상태로 모델이 학습을 과하게(overfitting)한 상태를 말한다.
- 학습이 과하게 되어 쓸데 없는 패턴을 모두 외워버려 오히려 처음본 데이터에 대한 예측 성능이 떨어진다.
- 보통 Train dataset의 크기에 비해 모델이 너무 복잡한 경우 발생한다.
- 보통 과적합이라고 하면 Overfitting을 말한다.
- 과소적합(Underfitting)
- 검증 결과 Train set과 Validation set 모두 성능이 안좋은 상태로 모델의 학습이 덜(underfitting)된 상태를 말한다.
- Train dataset의 크기에 비해 모델이 너무 단순한 해서 데이터에 대한 특징들을 다 찾지 못한 상태이다.
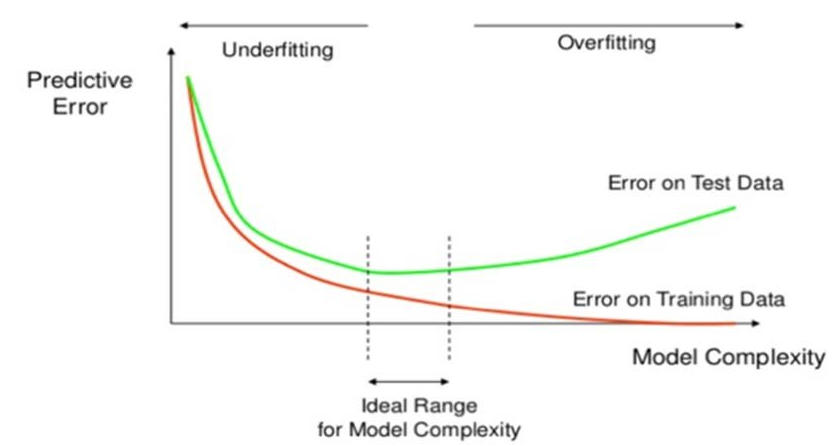
모델 복잡도에 따른 train/test set에 대한 성능 변화
과소적합(Underfitting) 개선
- 모델의 복잡도를 높인다.
- 모델 네트워크의 크기를 키운다.
- Layer나 Unit 개수를 늘린다.
- 모델 네트워크의 크기를 키운다.
- Epoch (또는 Step) 수를 늘린다.
- Train/Validation의 성능이 계속 좋아지는 상태에서 끝난 경우 더 학습을 시킨다.
과대적합(Overfitting) 개선
- 더 많은 data를 수집
- 데이터 추가 수집
- 일반적으로 데이터를 추가 수집하여 늘리는데는 시간과 돈이 많이 들기 때문에 힘들다.
- 다양한 Upsampling 기법을 이용해 데이터를 증식시킨다.
- 데이터 추가 수집
- 모델의 복잡도를 낮춰 단순한 모델을 만든다.
- 네트워크 모델의 크기를 작게 만든다.
- 모델의 학습을 규제하는 기법을 적용한다.
- Epoch(또는 step) 수를 줄인다.
- Validation의 성능 지표가 가장 좋았던 Epoch 까지만 학습시킨다.
- 과대적합을 방지하기 위한 규제 방식은 모두 모델을 간단하게 만드는 방법들이다.
Epoch과 과적합
- 데이터셋을 여러번 반복 학습을 하게 되면 초반에는 train, validation 성능이 모두 개선된다. 그러나 학습이 계속 반복되면 train 의 성능은 계속 좋아지지만 어느시점 부터는 Overfitting이 발생하여 validation 의 성능은 나빠진다.
- Epoch을 반복하는 것은 같은 데이터셋을 반복적으로 학습하는 것이기 때문에 적절한 Epoch수를 넘어가면 Overfitting이 발생한다.
- Validation set의 성능이 나빠지기 전의 반복횟수를 모델의 최적의 Epoch으로 선택한다.
DNN 모델 크기 변경
- 모델의 layer나 unit 수가 많을 수록 복잡한 모델이 된다.
- Overfitting일 경우 모델을 간단하게 만들고 Underfitting일 경우 모델을 크게 만든다.
- Layer의 수, 각 layer의 unit 수를 조정
- 큰 모델에서 시작하여 layer나 unit수를 줄여가며 validation loss의 감소 추세를 관찰한다. (또는 반대로)
데이터에 비해 작은 모델의 특징
- Train/Validation 성능 개선의 속도가 느리다.
- 반복횟수가 충분하지 않으면 학습이 덜된 상태에서 중단될 수 있다.
- Underfitting이 발생할 가능성이 크다.
데이터에 비해 큰 모델의 특징
- Validation 이 성능이 학습 초반부터 나빠진다.
- Train에 대한 성능은 빠르게 개선된다.
- Overfitting 발생할 가능성이 크다.
Dropout Layer 추가를 통한 Overfitting 규제
- Neural network의 Overfitting을 방지하기 위한 규제(regularization) 기법
- Overfitting의 이유는 모델이 너무 복잡하기 때문이다.
- 너무 복잡한 모델은 학습시 Train dataset으로 부터 너무 많은 특징을 찾기 때문에 일반성이 떨어지게 된다.
- Overfitting의 이유는 모델이 너무 복잡하기 때문이다.
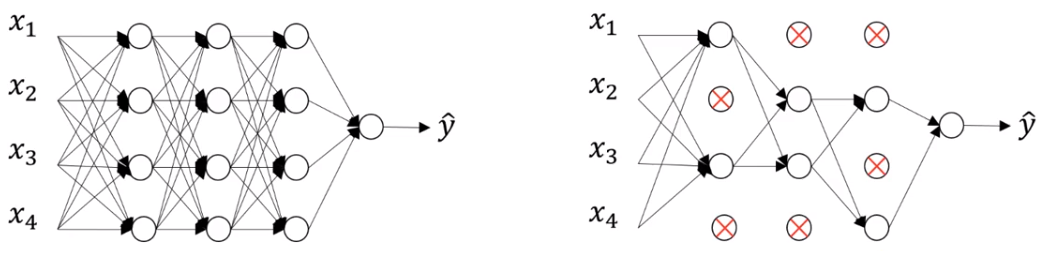
- Dropout Node
- 학습시 일부 Unit(노드)들을 Random하게 빼고 학습한다. 이때 빠지는 노드들을 Dropout Node라고 한다.
- 선택된 노드들의 weight들을 모두 0으로 학습시킨다. 이 노드들은 최적화 대상에서 빠진다.
- 학습시 일부 Unit(노드)들을 Random하게 빼고 학습한다. 이때 빠지는 노드들을 Dropout Node라고 한다.
- Dropout rate
- Dropout이 적용되는 Layer에서 Dropout Node의 비율로 보통 0.2~0.5 를 지정한다.
- 너무 크게 지정하면 underfitting이 발생한다.
매 Step 마다 Dropout Node들은 random하게 바뀐다.
- 효과
- Dropout은 overfitting의 원인인 co-adaptation 현상을 감소/방지하는 효과가 있다.
- co-adaptation 현상이란
- 학습시 생기는 오차를 줄이기 위해 네트워크 내의 모든 Node들의 모든 파라미터들이 업데이트 된다. 발생한 오차에 대해 모든 파라미터가 공동책임으로 업데이트 되는 것이된다. 그래서 각 Node들의 역할이 나눠지지 못하고 공동화되며 그로 인해 쓸데 없는 패턴까지 학습하게 되는 것이 된다. 이것이 overfitting의 원인이 된다.
- Dropout을 사용하게 되면 학습시 마다 Node들을 학습에서 제외하므로 이런 co-adaptation 현상을 줄여 줄 수 있다.
- Step마다 다른 network를 학습시키는 형태가 되어 앙상블(ensemble) 효과가 있다.
적용
- Dropout은 학습시에만 적용하고 검증, 테스트, 새로운 데이터 추론시에는 적용되지 않는다.
![Alt text]()
Batch Normalization (배치정규화)
- 각 Layer 에서 출력된 값을 평균=0, 표준편차=1로 정규화 하여 각 Layer의 입력분포를 균일하게 만들어 준다.
- 주로 큰 모델에서 성능이 높다. (CNN)
Internal Covariate Shift(내부 공변량 변화) 문제
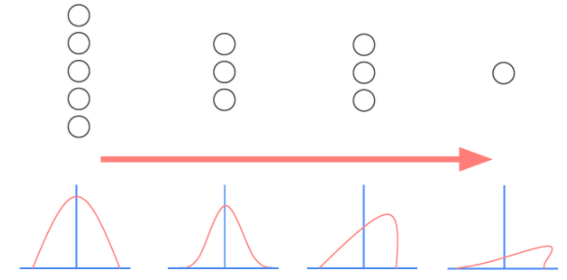
- 내부 공변량 변화란 학습 과정에서 각 층을 통과할 때 마다 입력 데이터 분포가 달라지는 현상이다.
- 입력 데이터의 분포가 정규분포를 따르더라도 레이어를 통과하면서 그 분포가 바뀌어 성능이 떨어지는 문제가 발생한다.
- 각 레이어를 통과할때 마다 분포를 정규분포로 정규화하여 성능을 올린다.
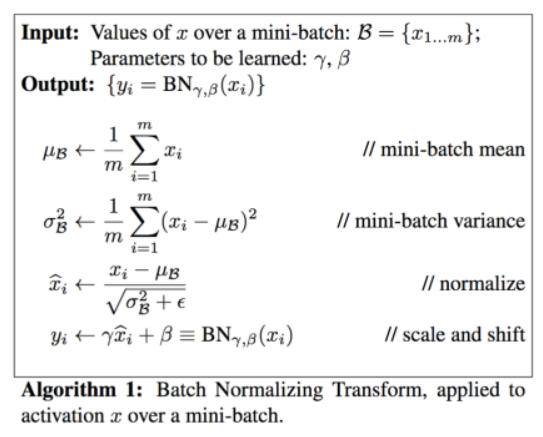
- $\gamma$: scaling 파라미터, $\beta$: shift 파라미터
- 항상 일정한 분포로 나오는 것을 방지하기 위해 $\gamma$와 $\beta$를 이용해 분포에 약간의 변화를 준다.
- $\gamma$와 $\beta$는 학습 과정에서 최적화 되는 값이다.
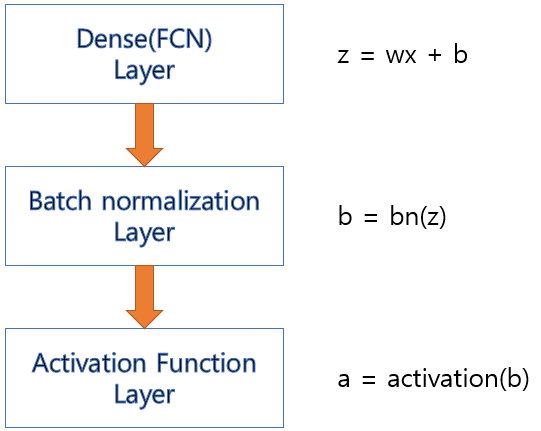
- Batch Normalization은 입력데이터와 파라미터의 가중합을 구한 결과에 적용한 뒤 그 결과를 Activation 함수에 전달한다.
효과
- 랜덤하게 생성되는 초기 가중치에 대한 영향력을 줄일 수있다.
- 학습하는 동안 과대적합에 대한 규제의 효과를 준다.
- Gradient Vanishing, Gradient exploding을 막아준다.
Hidden layer 배치 (block layer) 순서 정리
- 규칙의 단위로 한다
- 예시
- Dense layer 설정을 256 -> 128 -> 64
- 같은 block layer 2개씩
- 예시
- Dropout Layer -> Dense Layer(추론 Layer) -> Batch Normalization -> ReLU(Activation)
Optimizer의 Learning rate(학습율) 조정을 통한 성능향상
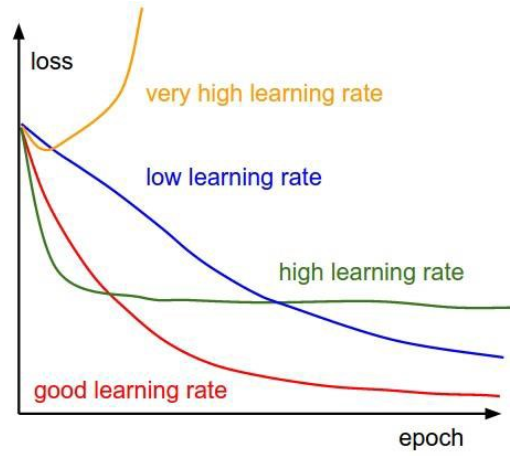
- Optimizer의 Learning rate이 너무 크거나 너무 작으면 최적의 파라미터를 찾지 못할 수 있다. 그래서 Learning rate는 모델 성능과 밀접한 관계가 있는 아주 중요한 Hyper Parameter이다.
- 학습 하는 동안 고정된 하나의 Learning rate를 사용할 수도 있으나 학습이 반복되는 동안 그 값을 변경하여 성능향상을 꾀핳 수 있다.
- 어떻게 조정할 지 다양한 알고리즘들이 있다. 대표적인 것은 초기 Learning rate를 크게 잡아주고 step이 진행될 수록 줄여주는 방식이 있다.
Learning Rate Decay
- 일정한 step 마다 일정한 비율로 Learning rate를 변경
- 초반에는 크게 설정하고 갈수록 줄여주는 방향으로 구현다.
- 일정 step동안 검증 성능지표가 향상되지 않으면 그때 learning rate를 조정한다.
- 학습 도중에 모델 성능 개선이 안되면 learning rate를 조정
- 언제 안좋아 지는 지 모른다. → 시스템한테 요청(callback)
- Tensorflow Framework 대신 학습 도중에 조정
- Callback: 학습 도중 특정 이벤트(변화)가 발생하면 호출되도록 정의한 기능
- 언제 값을 변경해주어야 하는 데 언제를 모르면 다 callback을 사용
Hyper parameter tuning
- Parameters
- 모델이 학습하여 데이터에 가장 적합한 값을 찾아내는 파라미터
- Weights $W$
- Bias $b$
- 모델이 학습하여 데이터에 가장 적합한 값을 찾아내는 파라미터
- Hyper parameters
- 모형의 구조를 결정하거나 optimization 방법을 결정하는 변수들로 개발자가 직접 설정하는 파라미터
- Optimizer의 종류
- learning rate($\alpha$)
- Hidden layer의 수
- Hidden unit의 수
- Iteration의 수
- Activation function의 종류
- Minibatch size
- Regularization
- dropout rate
- etc..
- 다양한 조합의 hyper parameter를 시도해서 loss 함수가 빠르게 감소하는 hyper parameter를 찾아내는 시도가 필요